terça-feira, 30 de abril de 2013
segunda-feira, 22 de abril de 2013
Objeto Interativo
A minha ideia foi fazer um que pudesse ser montado. A principio pensei em fazer com formato de cubos, mas depois de criticas dos professores (limitação de usos) resolvi fazer em forma de hexágono assim ampliaria as possibilidades de montagem do objeto. Ele também acenderia dependendo de sua posição.
Para fazer os objetos usei papel vegetal, leds, resistores, baterias, fios e sensores de "mercúrio" caseiro (criado com a ajuda do Pedro da informática).
O sensor caseiro foi feito de mangueira de chuveirinho transparente, bolinha de roda de rolimã e fio de cobre.








Vídeo do Objeto Interativo
domingo, 21 de abril de 2013
Strandbeest - Theo Jansen
WRTGF Theo Jansen é um artista cinético holandês, criando novas formas de vida desde 1990. Ele é o pai do "Animari" criaturas de praia, ou "strandbeeests", feitos de tubos de PVC, que andam na praia, alimentados pelo vento. Eles nascem dentro de um computador como um algorismo, mas eles não precisam de motores, sensores ou qualquer outro tipo de tecnologia avançada a fim de andar. Eles se movem graças a força do vento e areia molhada que encontram em seu habitar da costa holandesa.



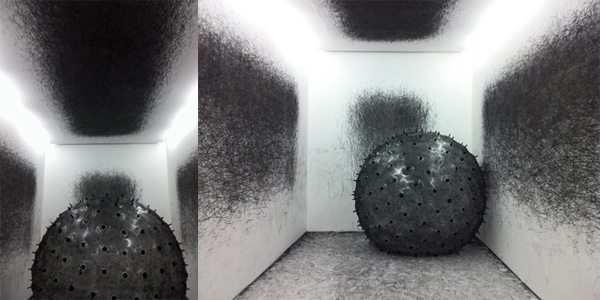
ADA - Karina Smigla-Bobinski
ADA é uma instalação interativa gigante, uma experiência física de codificação que o artista e o público criam juntos. ADA é uma enorme bola preenchida com uma combinação de hélio e ar, feita de uma membrana de silicone que
flutua livremente no espaço da galeria. Ligado
à membrana são 300 pedaços de carvão que deixam suas marcas nas paredes, teto e
piso, já que os usuários se envolvem com o objeto, empurrado e girando-o. Construído para ter a sua própria
vontade, a ADA não segue programas ou comandos,
mas é uma obra de arte autônoma reforçada pela reação das pessoas a ela.
A obra é chamada de ADA em
homenagem a Ada Lovelance, filha do poeta britânico Lord Byron, reconhecida no
séc. XIX por ser a primeira programadora da historia.




domingo, 14 de abril de 2013
Inhotim
Na visita ao Inhotim (Instituto de Arte Contemporânea e Jardim Botânico) meu grupo escolheu o Sonic Pavilion (Som da Terra), obra de Doug Aiken. Em "Soud Paviloion" (2009), Doug Aiken proporciona ao visitante a experiencia de escutar o som do interior da Terra em tempo real. A obra consiste numa instalação sonora localizada num pavilhão idealizado pelo artista com formato circula e fechamento de vidro. No centro do pavilhão num furo de 200 metros de profundidade foram instalados microfones de alta sensibilidade, que captam diferentes frequências de som. Os ruídos do interior da Terra são amplificados dentro do prédio trazendo á superfície indício de uma realidade quase sempre inimaginável. Localizada no alto de uma montanha, numa área de expansão de Inhotim, a obra permite a visão de um vasta paisagem de mata.
.jpg)
.jpg)


domingo, 7 de abril de 2013
Sensores Analógicos
Os sensores
analógicos são aqueles que respondem através de sinais analógicos, ou seja,
sinais que, mesmo limitados em uma certa faixa, podem variar entre inúmeros
valores de tensão intermediários.

O exemplo mais
comum de sensor resistivo é o LDR (Light Dependent Resistor – Resistor
Dependente de Luz), um componente onde uma variação na luminosidade que incide
sobre ele resulta numa variação na sua resistência.
O LDR não tem
pinagem, ou seja, podemos ligar seus terminais de qualquer forma.
Para fazer a
medida da luminosidade do ambiente através do LDR, precisamos fazer com que a
variação da resistência do componente seja convertida numa variação de tensão.
Essa tensão pode ser utilizada por um circuito externo ou ser monitorada
através da entrada analógica do MEC1000 ou do KDR5000, por exemplo. O meio mais
fácil de conectá-lo é através de um divisor de tensão.

Outro modelo de
sensor resistivo muito comum é o termistor, um componente destinado medir
variações de temperatura.
Assim como o
LDR, o termistor não possui uma pinagem específica. O termistor, de acordo com
a simbologia europeia.
Existem dois
tipos de termistores, NTC e PTC, assim classificados de acordo com sua resposta
em função da temperatura. Os termistores NTC (Negative Temperature Coef icient
– Coeficiente de Temperatura Negativo) são os modelos mais comuns e são feitos
de materiais semicondutores simples. Eles são assim denominados, pois a
resistência desses componentes diminui quando a temperatura aumenta, ou seja,
eles possuem um coeficiente de temperatura negativo.
Os termistores
PTC (Positive Temperature Coef icient – Coeficiente de Temperatura Positivo)
são mais difíceis de serem encontrados, pois são constituídos de elementos mais
complexos e, portanto, mais caros. Seu comportamento é contrário aos NTC, pois
o aumento da temperatura faz com que sua resistência também aumente. Os
termistores PTC são mais comumente aplicados para proteger circuitos
eletrônicos de excessos de correntes, substituindo os fusíveis tradicionais.
Para fazer a
medição da temperatura através do termistor, podemos ligá-lo na forma de um
divisor de tensão, pois ele é um sensor resistivo. Desse modo, a tensão
resultante nesse circuito será correspondente à temperatura do ambiente. Isso
porque, como vimos acima, a resistência do termistor está relacionada como a
temperatura do ambiente ao seu redor.

Os sensores de
peso (que também são conhecidos como sensores de pressão ou de força) podem ser
construídos de diversas formas, mas os modelos mais comuns e cuja utilização é
mais simples são os resistivos. O princípio de seu funcionamento é bem simples:
quanto maior a força exercida sobre ele, menor será a resistência entre seus
terminais.

Um potenciômetro
é um componente eletrônico que possui resistência elétrica ajustável.
Geralmente, é um resistor de três terminais onde a conexão central é deslizante
e manipulável. Se todos os três terminais são usados, ele atua como um divisor
de tensão.
Existem
comercialmente, potenciômetros confeccionados com substrato em fio e carvão condutivo,
a depender da corrente elétrica que circula nestes. Há potenciômetros cujo giro
é de 270 graus e outros de maior precisão chamados multivoltas.
Exemplo de uso:
tem-se fonte de 12V. Pretende-se ativar um circuito que necessita de 8V e outro
que necessita de 4V. Coloca-se um potenciômetro com sua perna central conectada
ao positivo da fonte e as outras duas conectadas aos circuitos e, então, basta
regular.

O microfone
converte vibrações mecânicas na gama audível (em frequências de 20Hz a 20kHz –
seja no ar, água ou num material sólido) em um sinal elétrico. Na maioria dos
microfones em uso as ondas sonoras são convertidas em vibrações mecânicas através
de um diafragma fino e flexível e em seguida convertidas em sinal elétrico através
de bobina móvel ou por carga e descarga de um condensador. No caso de
microfones de condensador estes necessitam de uma tensão de alimentação
continua, chamada de phantom Power, que é de fato uma tensão de polarização.
A tensão
de repouso (Vrep), também chamada de nível DC ou Offset, é a tensão presente na
saída do circuito quando o sensor estiver em repouso, ou seja, quando nenhum
som é captado pelo microfone. No momento em que as ondas sonoras fazem vibrar o
diafragma do microfone, é gerado então um sinal variável.
Como o
sinal é alternado, a sua tensão varia acima e abaixo da tensão de repouso. No circuito
acima, a tensão de repouso é de 0V. Ou seja, quando o microfone captar algum
som, haverá um sinal analógico que varia até uma tensão de pico V, ou seja, de
+V (valor máximo) a -V (valor mínimo).

A maior parte
dos conversores A/D não pode ler tensões negativas, como por exemplo, o
conversor A/D presente no microcontrolador do KDR5000 e do MEC1000, que suporta
tensões de 5 V a 0 V. Sendo assim, é necessário fazer com que a tensão de
repouso seja maior, para que o valor mínimo do sinal analógico seja
ligeiramente maior que 0 V. Desse modo, o sinal de saída do microfone estará
enquadrado nos valores de leitura do conversor.

O sensor de
vibração é um componente destinado a captar uma vibração e convertê-la num
sinal elétrico. Seu funcionamento é muito semelhante ao de um microfone, mas
enquanto que no microfone as vibrações são causadas por ondas sonoras, o sensor
de vibração destina-se à vibração de estruturas.
Como o sensor
de vibração utilizado é composto unicamente por um cristal piezoelétrico com
dois eletrodos, sem nenhum componente eletrônico extra, não é necessário
alimentá-lo. Um dos terminais do sensor deve ser aterrado, ligado ao negativo
da alimentação. O outro terminal será a origem do sinal do sensor, que será
monitorado por um circuito externo, depois de ser previamente adequado.

Existem vários modelos de
sensores de distância disponíveis no mercado, baseados em radar, ultra-som,
laser ou infravermelho. Os sensores baseados em radar e ultra-somsão caros e
relativamente difíceis de operar. Á
os sensores ópticos, que utilizam raios laser ou infravermelho, tem seu funcionamento
baseado no princípio da triangulação. Um feixe de luz é emitido por um diodo
laser ou um LED infravermelho. Ao ser refletido por um objeto, esse raio é
detectado por um PSD (Position Sensing Device – Dispositivo de Monitoramento de
Posição). De acordo com a distância do objeto que refletiu a luz, esse raio
incide de modo diferente no PSD.

O PSD é
composto por vários componentes sensíveis à luz (fotodiodos). Um módulo de
processamento monitora a resposta do PSD, podendo identificar a posição exata
em que o raio incidiu no componente. Como essa posição depende da distância do
objeto que refletiu o feixe de luz, o módulo processa esses sinais de modo a
produzir uma saída correspondente a essa distância.
Quando
alimentado corretamente, o módulo de processamento do sensor gera um sinal de
saída cuja tensão varia de acordo com a distância do objeto. Objetos numa
distância de 5 a 80 cm do sensor podem ser facilmente identificados. Quando a
distância entre o sensor e o objeto se manter estável, a tensão de saída do sensor
será constante, correspondente à distância do objeto.
A utilização
desse sensor é muito simples. Ele possui apenas três terminais de conexão, que
podem ser identificados através da figura abaixo. A alimentação deve ser feita
ligando o terminal V+ é à alimentação de 5V e o terminal GND deve ser ligado ao
0 V. É importante que a tensão não seja superior ou inferior a 5 V, com o risco
de queima ou não funcionamento do componente. O terminal Vo é à saída do
sensor.


Assim como
qualquer sensor analógico, eles possuem um sinal de saída cuja tensão
corresponde à temperatura do ambiente onde se encontra o sensor. Esse sinal
analógico pode ser utilizado por um outro circuito analógico, como um AmpOp
comparador, ou pode ser convertido num sinal digital para ser monitorado por um
circuito digital, como um microcontrolador.

Nos
acelerômetros analógicos, a saída é um valor de tensão proporcional à
aceleração sofrida pelo componente. Caso a aceleração se mantenha constante, a
tensão na saída do acelerômetro também estará constante.
Para melhores explicações
entre no link
http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/tutorial_eletronica_-_aplicacoes_e_funcionamento_de_sensores.pdfsexta-feira, 5 de abril de 2013


Viagem - Catas Altas (MG)
Detalhes da igreja principal de Catas Altas
Nossa Senhora da Conceição
.jpg)
.jpg)
Workshop de Croqui 1
.jpg)
.jpg)
Croquis da cidade
.jpg)
.jpg)
Croquis do local escolhido
para a Intervenção
.jpg)
.jpg)
{kind=link}
{kind=link}
{kind=link}
quinta-feira, 4 de abril de 2013
Performance em Catas Altas
Em Catas Altas cada grupo teve que escolher um lugar para a intervenção e fazer uma performa no local escolhido. o meu grupo escolheu a praça da quadra segue abaixo o link da performance.
http://www.youtube.com/watch?v=TWwvblXQMZc
http://www.youtube.com/watch?v=TWwvblXQMZc
Assinar:
Postagens (Atom)